
The whole pop-up phenomenon just got a bit more literal, with the debut of tiny robots inspired by pop-up books.
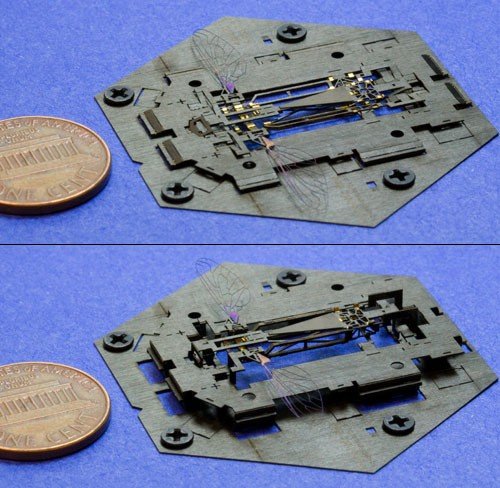 [Image: The pop-up robot sheet, developed at Harvard].
[Image: The pop-up robot sheet, developed at Harvard].
Equal parts origami and electrical engineering, each robot “has 137 folding joints,” PopSci explains. “The assembly scaffold, which has folds of its own, performs 22 origami-style folds, resulting in a fully formed robot you can pop out and turn on.”
Science Daily points out that this “will soon allow clones of robotic insects to be mass-produced by the sheet.”
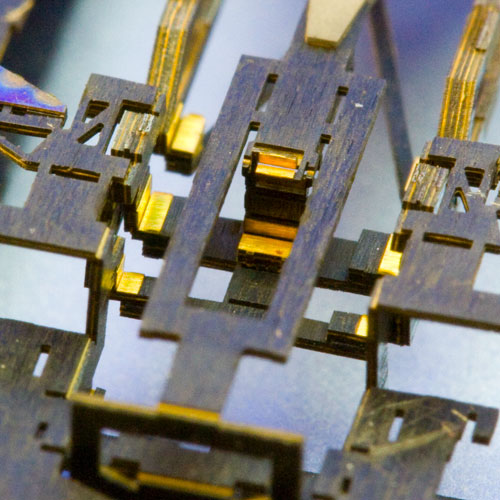 [Image: A close-up of the pop-up sheet, courtesy of Harvard].
[Image: A close-up of the pop-up sheet, courtesy of Harvard].
The system, developed at Harvard, “works by combining all the robots’ component layers, [and] sandwiching each piece of metal or carbon fiber into a single sheet. First each layer is laser-etched into the proper design, and the sheets are laminated together. The end result is a hexagonal sheet with a small assembly scaffold, with the whole thing the size of a U.S. quarter.”
On a wildly different scale, and relevant only for reasons of formal resemblance, I’m reminded of Bernard Khoury’s B 018 project in Beirut, a nightclub that “comes to life in the late hours of the night when its articulated roof structure constructed in heavy metal retracts hydraulically. The opening of the roof exposes the club to the world above and reveals the cityscape as an urban backdrop to the patrons below.” Prior to that moment of retraction, Khoury’s “building” is more like a highly compressed 2D surface.
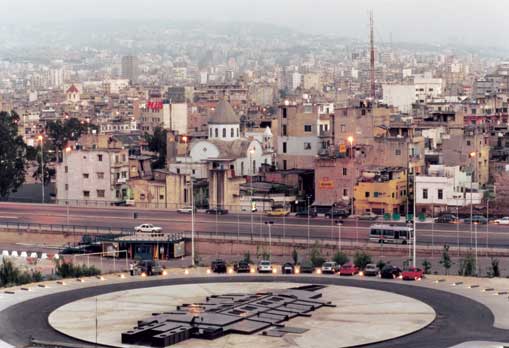


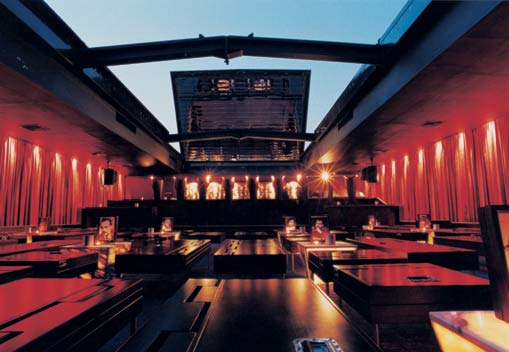 [Images: B 018 by Bernard Khoury].
[Images: B 018 by Bernard Khoury].
The point of this comparison being to wonder aloud what sorts of pop-up architecture might be possible using the sandwiched components technique described above. What might “soon allow clones of robotic buildings to be mass-produced by the sheet,” if we could export and scale this up to the world of spatial design? 2D surfaces that pop-up—or pull down—into functional buildings.
 [Image: A 2005 installation by Do-Ho Suh; photograph by Marcus Trimble].
[Image: A 2005 installation by Do-Ho Suh; photograph by Marcus Trimble].
Buildings that pop up out of city sidewalks; robots that pop up out of those buildings’ floors; smaller buildings that pop up out of those pop-up robots; tiny, insect-sized robots that pop up out of them.
In the recent Japanese animated Evangelion movies, an entire sub-section of Tokyo pops up from subterranean locations when the region is safe from monsters.
It's as if the people within the movie have reacted to multiple Godzilla attacks by attempting to not be in the way, rather than going out and hunting down big lizards worldwide.
Reminds me of the space saving scenes you often see in futuristic urban settings, where the room is merely an empty capsule and a bed or shower pop out of the wall when needed to be used.
After thinking about where those things are hiding when they are not being used, the fascination for me with B018 lines in its masking of a void; a perceived groundplane shifting and opening up into something hidden below the surface.
What is also important and pretty magical about each example above is the creation of that second place. One surface becoming two. One space becoming multiple spaces. For me, I think the hardest part to design would be the moment where one transitions.
It looks like a missile silo. I visited one in CA that was exactly like this. The rectangular opening was the missile elevator.